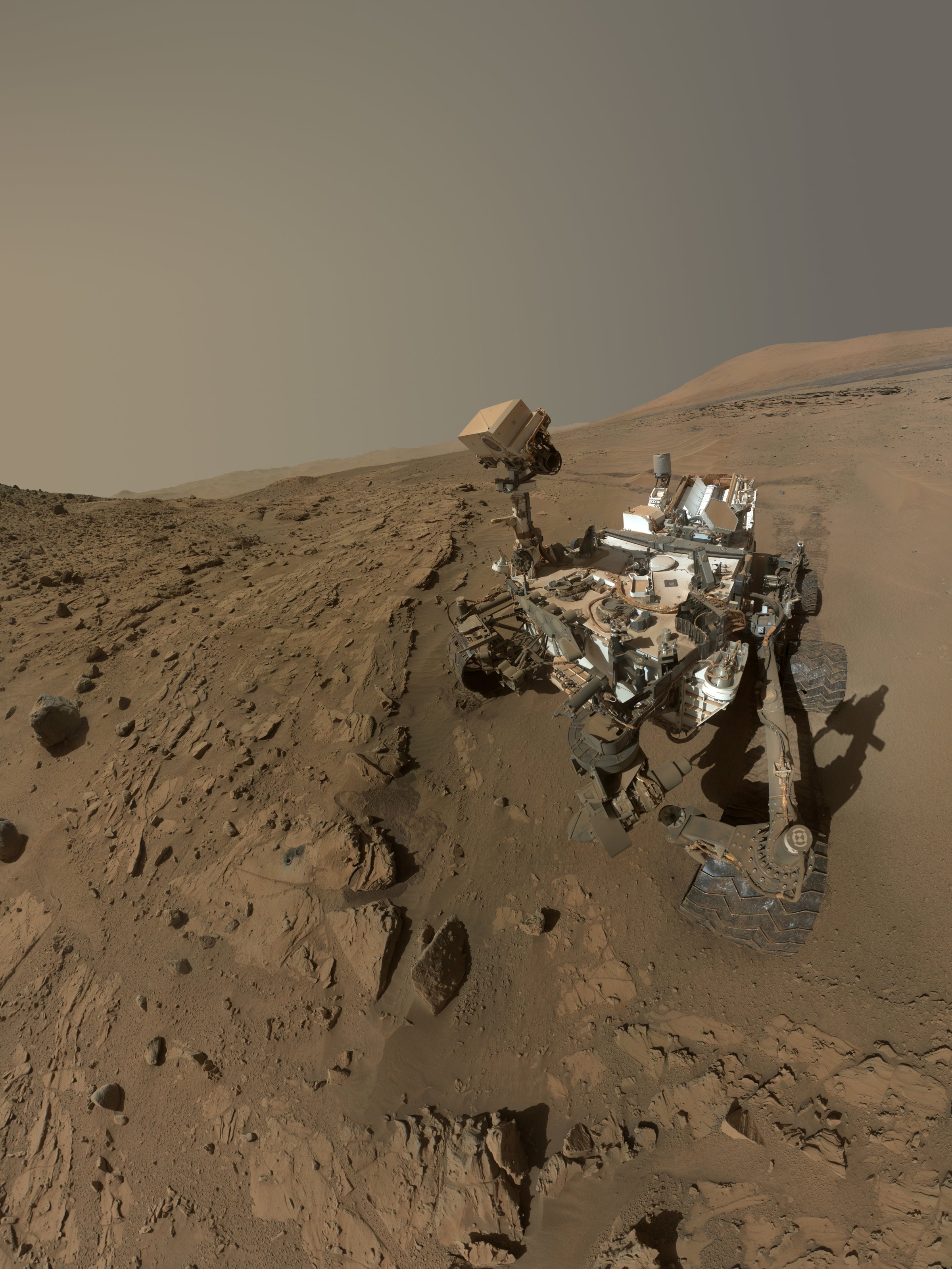
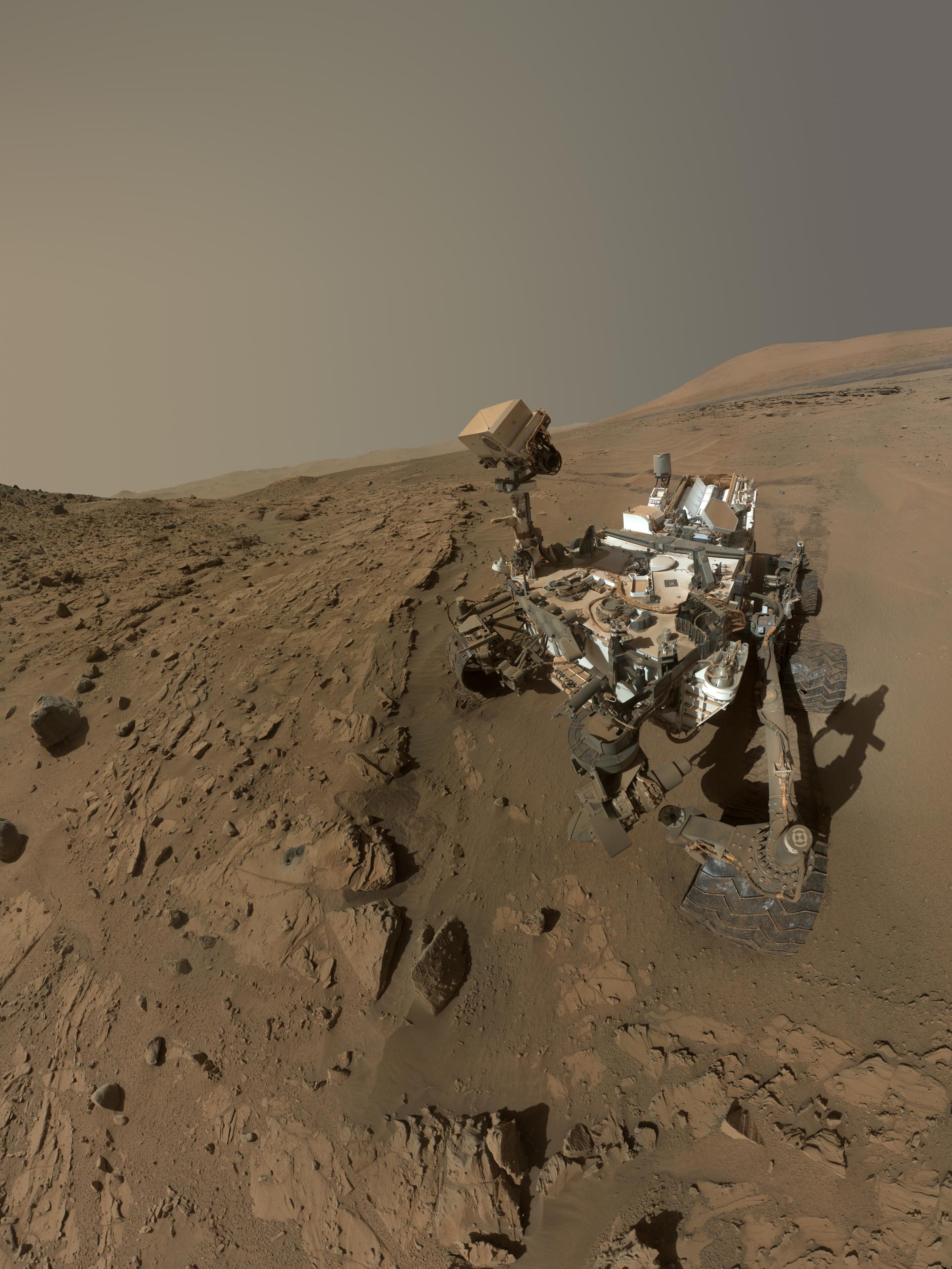
When Curiosity celebrated its first Martian year on the red planet last month, it beamed back to Earth a selfie. Standing alone in a desolate landscape, with its companions Opportunity and Spirit standing on the other side of the red planet, Curiosity can feel good about itself. Some 100 million miles away, crowds of Earth-based creatures are following its every move and rejoicing at the hundreds of images it’s shared since landing on Mars on August 6, 2012.
“People feel for this robot,” says Dr. Mark Lemmon, an Associate Professor in atmospheric sciences at Texas A&M University and a member of the imaging team at Malin Space Science Systems (MSSS), a San Diego company tasked with controlling four of Curiosity’s 17 cameras. “It’s nice that people can take it seriously that way, and we certainly have those kinds of feelings, too—these robots are important for us. The idea that we managed to successfully communicate to the public not just what we’re doing but that we have a robot that’s exploring Mars for us, that’s extremely cool.”
His colleague at MSSS, James F. Bell, agrees. “People relate to these rovers because there’s been so much of an investment—not just in terms of money, but in people’s time and efforts. These rovers and the robotic work that goes on in space exploration is some of the best and most exciting and most successful stuff that NASA is doing right now.”
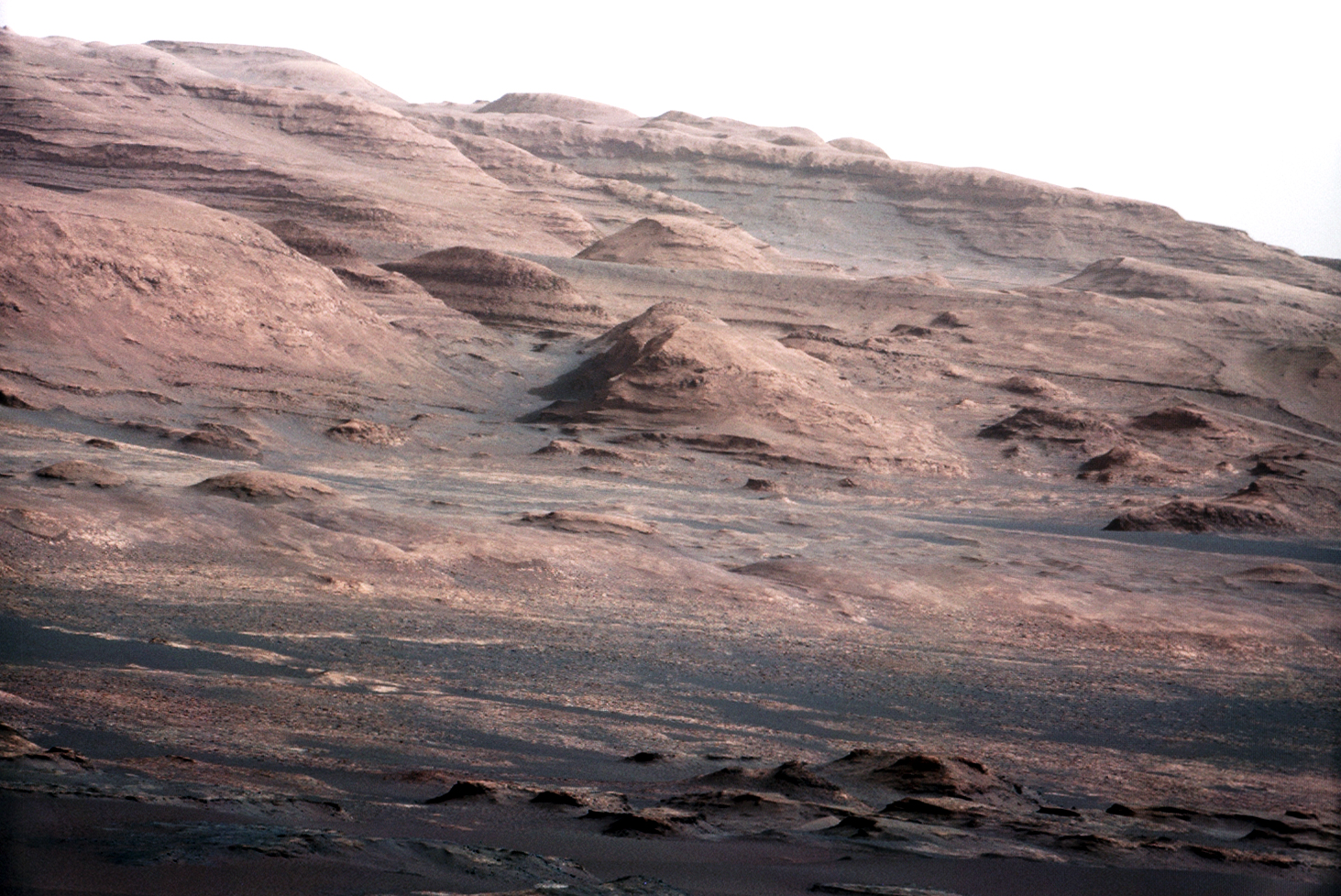
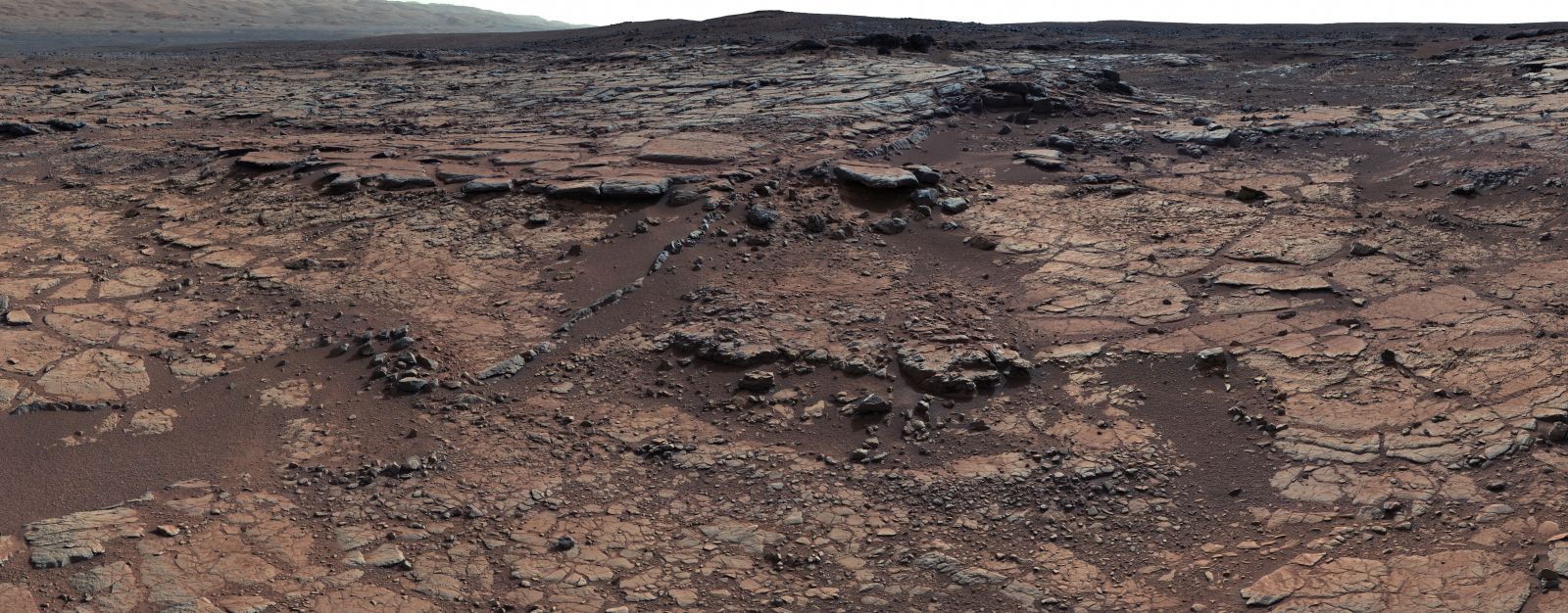
In just 10 years, Spirit, Opportunity and Curiosity have broadened and deepened our understanding of Mars, sending back to Earth thousands of images that have been closely studied by research centers and universities around the world.
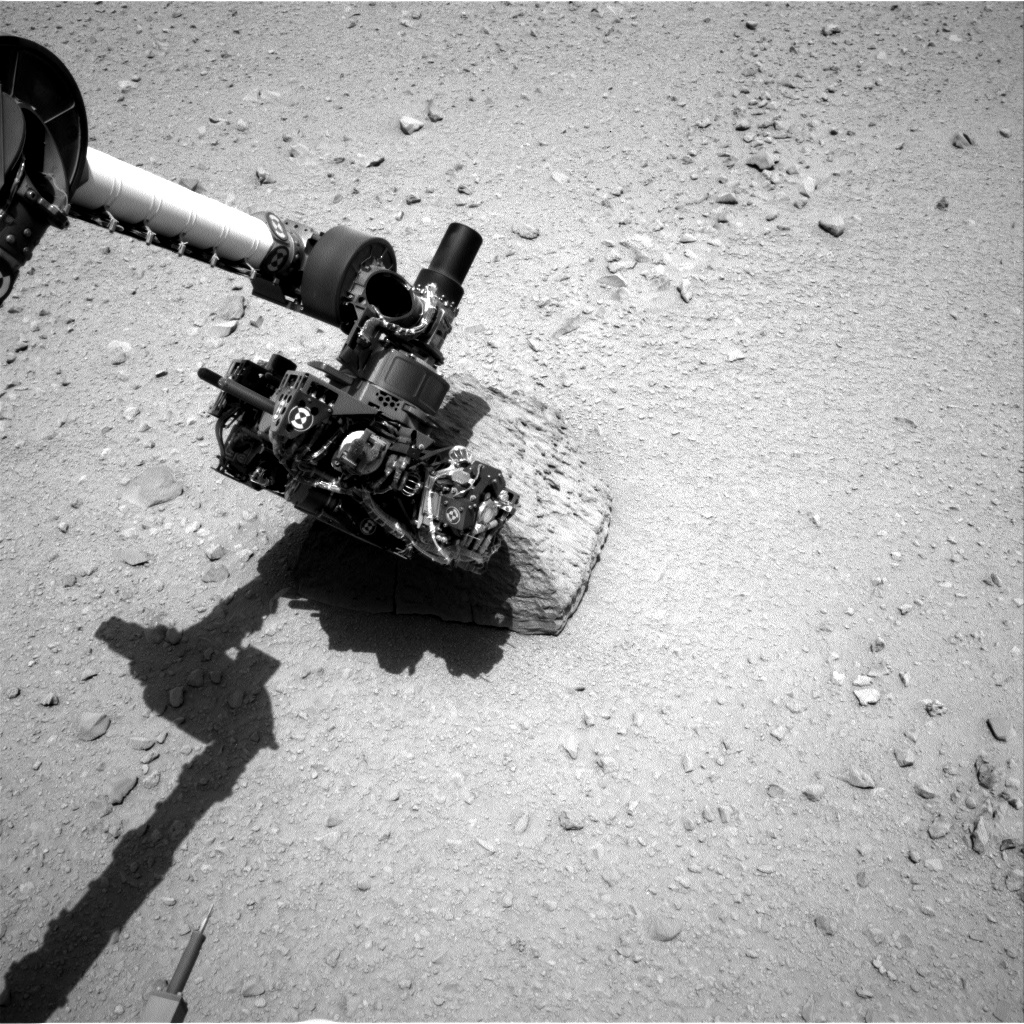
Yet, capturing these images isn’t as simple as pushing a button, especially when your camera is millions of miles away. “It’s literally out of this world,” says Bell, who works on the imaging team at MSSS. “[We control] two color cameras up on Curiosity’s mast—we call them the Mastcams. There’s the Mars Descent Imager or MARDI, and the Mars Hand Lens Imager (MAHLI),” which is located on Curiosity’s robotic arm. “These cameras were built and are operated by MSSS in San Diego.”
As deputy principal investigator on the Mastcam and MARDI cameras, Bell is involved in day-to-day operations, making sure that they’re running properly and correctly calibrated.
“There’s a process that goes on every day,” he tells TIME. “We have briefings with all the different instrument teams where we plan [the rover’s activities]. Engineers will tell us how much power we have available, how much time we have with each instrument, and how much data we can send back. We will start with that resource envelope and then tactically figure out where we are and what we need to do.”
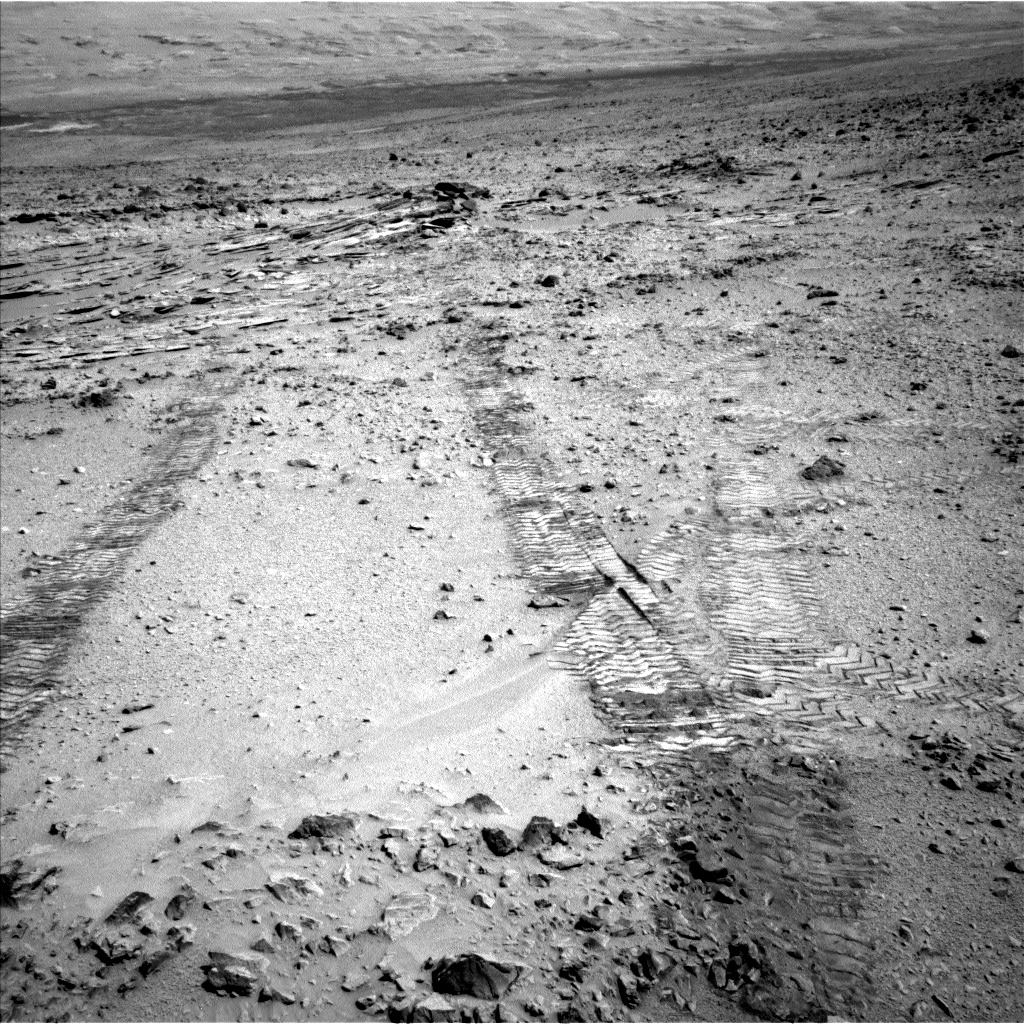
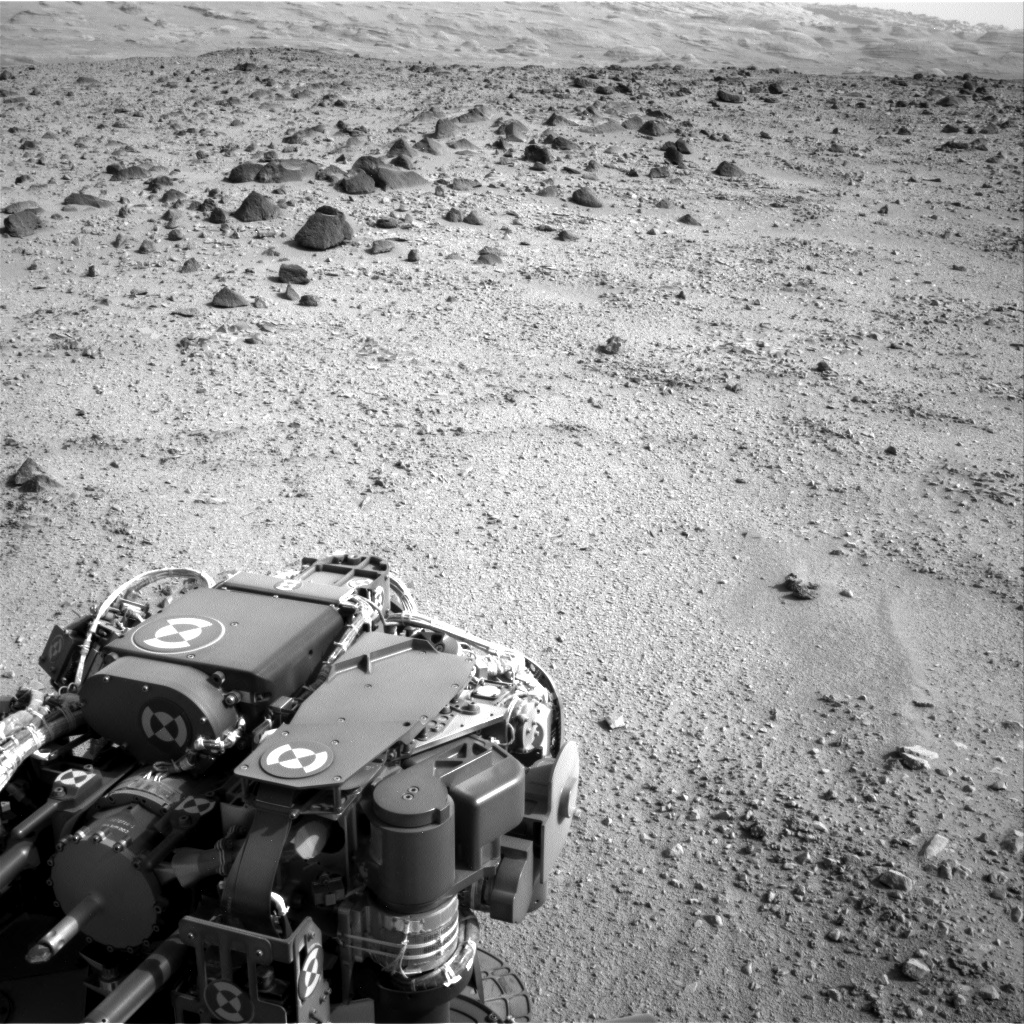
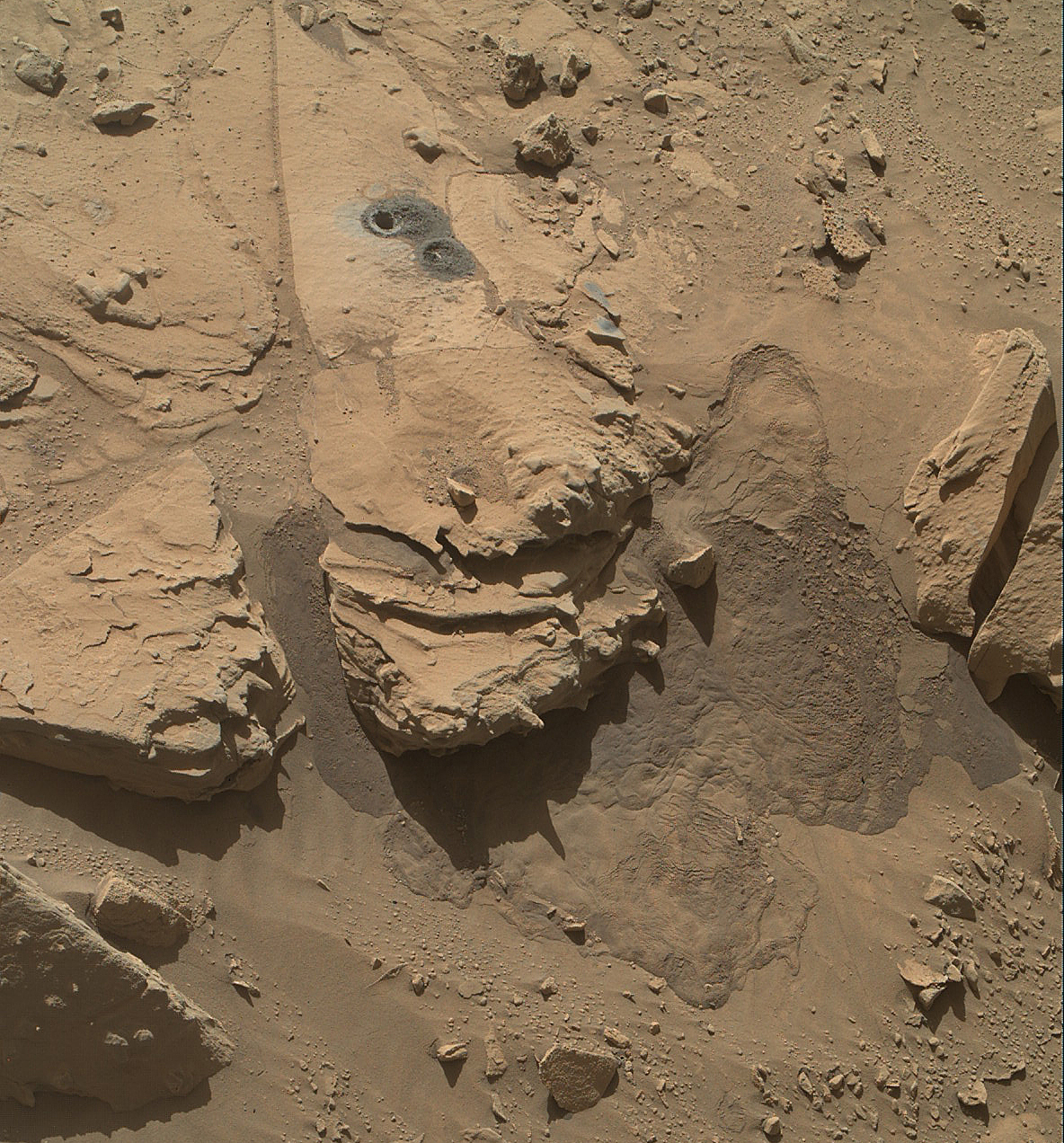
“Generally speaking, at the end of each drive, we use the one-megapixel Navcam [a navigational camera], which has a wide field-of-view, to give us a low-resolution picture of where we are,” adds Lemmon. As the different science teams study that image, they will make a list of targets for higher-resolution images. Is there an interesting rock formation on the left, some features on the crater wall on the right, or an interesting rock right in front of the rover? “That’s when we say we need a picture.”
This translates into a series of commands that will be beamed from Earth to NASA’s Mars Reconnaissance Orbiter (MRO) and the Mars Odyssey probe and down to Curiosity. “The camera command is a relatively simple line of instructions that tell the rover which camera to use [the two cameras on Curiosity’s Mast have different focal length: 34mm and 100mm], which filter to put on each camera, what focus position and what kind of exposure time it should use,” Bell explains. “Should we compress the data? If it’s a scene full of very fine details, we want it uncompressed. Or can we afford to compress the data, because the more we can compress, the more we can take. And then what priority should that get on the downlink? We can store an enormous amount of data on board, but can only downlink a small amount every day.”
The rover cameras are each fitted with 1MB of flash memory—equivalent to one raw image—while Curiosity itself sports “enough memory to store many days’ worth of data,” notes Lemmon. But that data has to make its way back to Earth, and with just a short window of 15 to 20 minutes of communications between the rover and MRO or Odyssey, only around 31MB of data can be transmitted each day.
The Jet Propulsion Laboratory at the California Institute of Technology then turns these zeros and ones into images. “This is raw data,” says Bell. “There are some artifacts that need to be corrected, like in your traditional camera, so we run those corrections, put a header and label on these images, describing as much as we can about them, and release them to the public. It’s in the spirit of openness and participation, but also acceptance of the fact that there are many armchair astronomers out there who like to play with data and put their own panoramas together. We’re exploring [a new world] and we don’t often know what we’ll see when we turn a corner.”
This openness has created an enormous amount of goodwill and interest from the public. When Spirit found itself stuck in a sand-filled crater, the Free Spirit movement was launched, with some arguing that NASA’s first human mission to Mars should strive to retrieve the beloved rover.
In January 2014, Spirit and Opportunity also became the stars of an exhibition at the National Air and Space Museum, with hundreds of the rovers’ landscape photographs on show. “I think it’s wonderful that we have the luxury of being able to take some beautiful pictures,” says Bell. “Sometimes we can come up with scientific reasons [for these photographs], but, to be honest, sometimes there are very weak scientific reasons. It’s just a beautiful picture of a sunrise, a sunset, or a self-portrait.”
Olivier Laurent is the editor of TIME LightBox. Follow him on Twitter and Instagram @olivierclaurent.







More Must-Reads From TIME
- The 100 Most Influential People of 2024
- How Far Trump Would Go
- Why Maternity Care Is Underpaid
- Scenes From Pro-Palestinian Encampments Across U.S. Universities
- Saving Seconds Is Better Than Hours
- Why Your Breakfast Should Start with a Vegetable
- Welcome to the Golden Age of Ryan Gosling
- Want Weekly Recs on What to Watch, Read, and More? Sign Up for Worth Your Time
Contact us at letters@time.com